“北航未来通信与网络论坛(FutureCom)”系列学术论坛面向国家重大需求、探索5G/6G国际学术前沿,构建国内外专家学者共同交流平台,助力各界人士对未来网络产业发展的思考和探索。论坛由北航未来通信与网络工作推进组主办。
中国科学技术大学教授、国聘专家、IEEE Fellow张燕咏教授在第17期北航未来通信与网络论坛(FutureCom)上分享了以”面向自动驾驶的智能感知”为题目的主题报告。
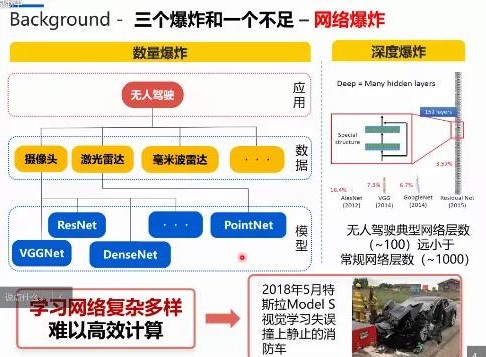
讲座中,张燕咏教授首先介绍了当前无人驾驶感知存在着由于传感器部署精度、数量增加而导致的数据爆炸问题,由于海量不同传感器带来的网络爆炸问题以及由于场景复杂多变、难以准确感知造成的场景爆炸和算力不足等问题,进而引出通过多传感器数据的深度融合、感知学习和计算融合两个层面的多模融合感知技术。
张教授讲解了感知智能的系统架构,通过感知系统实现目标识别、跟踪等功能并输出可进一步表示对周围环境、动态障碍物和车自身的理解,感知效果会受到复杂场景因素影响。
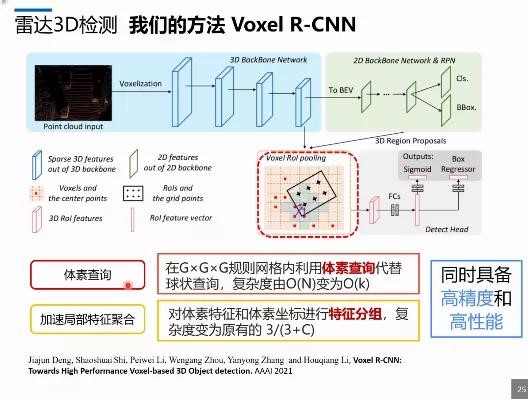
针对多模融合感知技术的特点,现有的摄像头和激光雷达在无人检测领域的优势和不足,张教授回顾了雷达3D监测的基于体素和基于点的两类方法,并提出了Voxel R-CNN,通过体素查询和加速局部特征融合来实现高精度和高性能检测。
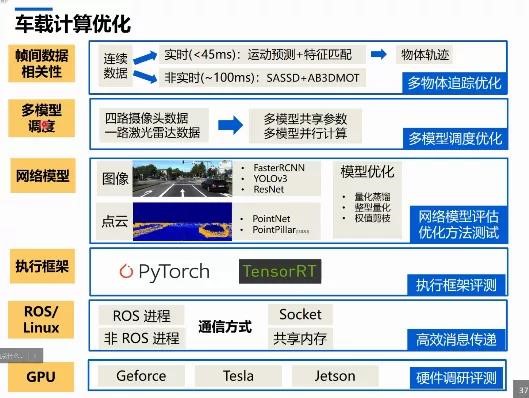
最后,张教授认为多模态融合的3D感知是未来的发展方向,可以有效提高系统的鲁棒性。她提出,针对多模态融合的精确度,需要关注不同模态间的一致性,以及互相映射过程中减少信息损失。通过产生虚拟点云,将多模态特征统一采样至3D空间实现信息损失,通过多模态数据增强、多分枝采用不同权重监督,以减少信息损失。最后,张教授分析了车载计算优化的方法,介绍了通过深度强化学习来实现端到端的决策、提升感知能力的方法,并对未来的车路协同、智慧交通进行了展望。
讲座后,张燕咏教授与老师、同学进行交流探讨,拓展了与会师生的科研视野和思路,本次讲座圆满结束。
此次论坛由北航未来通信与网络工作推进组组长、深圳北航新兴产业技术研究院院长刘荣科教授主持。

